3D Human Reconstruction with Collaborative Aerial Cameras
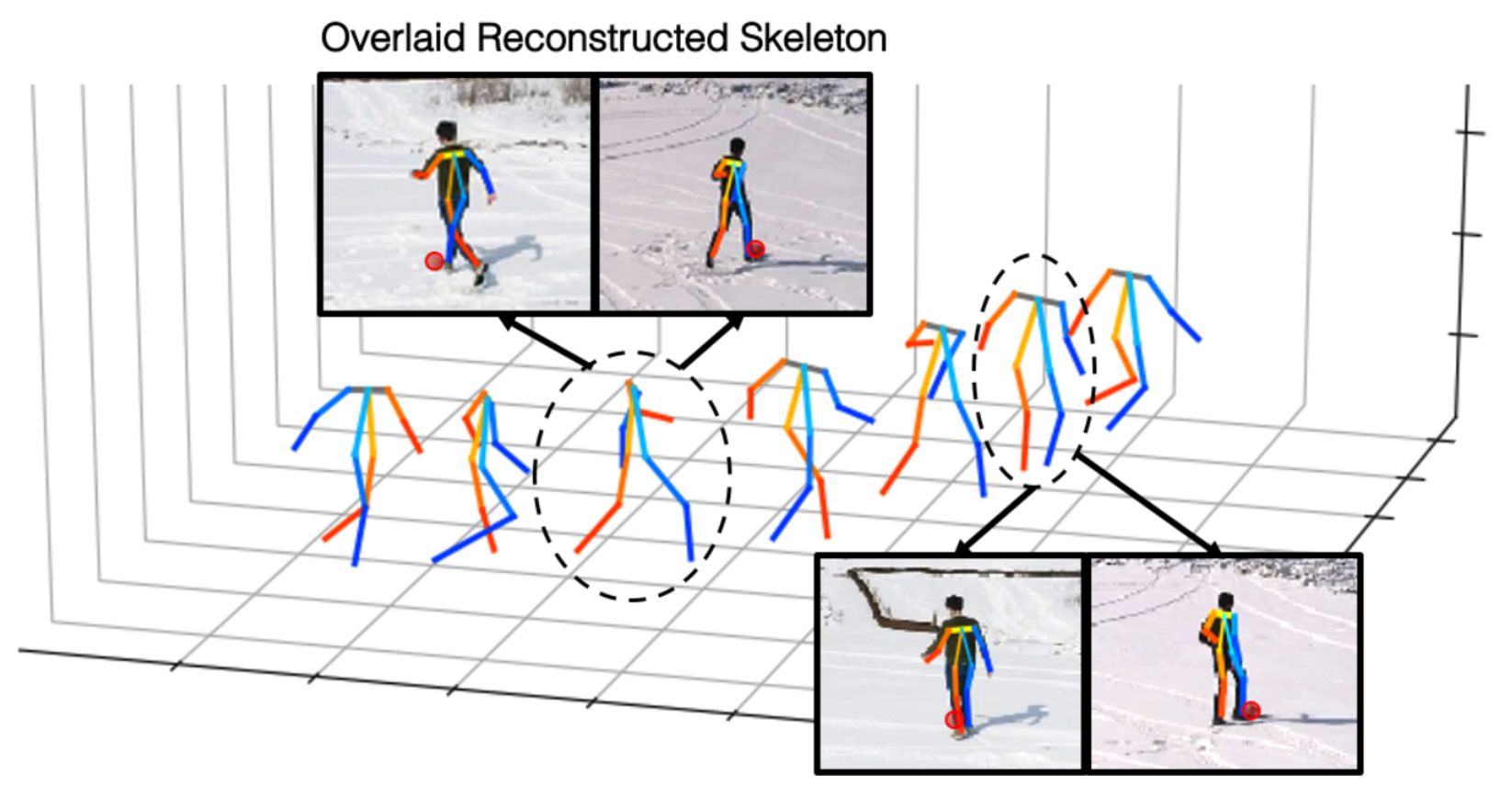
Aerial vehicles are revolutionizing applications that require capturing the 3D structure of dynamic targets in the wild, such as sports, medicine and entertainment. The core challenges in developing a motion-capture system that operates in outdoors environments are: (1) 3D inference requires multiple simultaneous viewpoints of the target, (2) occlusion caused by obstacles is frequent when tracking moving targets, and (3) the camera and vehicle state estimation is noisy. We present a real-time aerial system for multi-camera control that can reconstruct human motions in natural environments without the use of special-purpose markers.
Multi-camera coordination
We formulate a multi-camera coordination scheme with the goal of maximizing the reconstructed 3D pose quality of dynamic targets. We develop a scalable two-stage system with long planning time horizons and real-time performance that uses a centralized planner for formation control and a decentralized trajectory optimizer that runs on each robot.
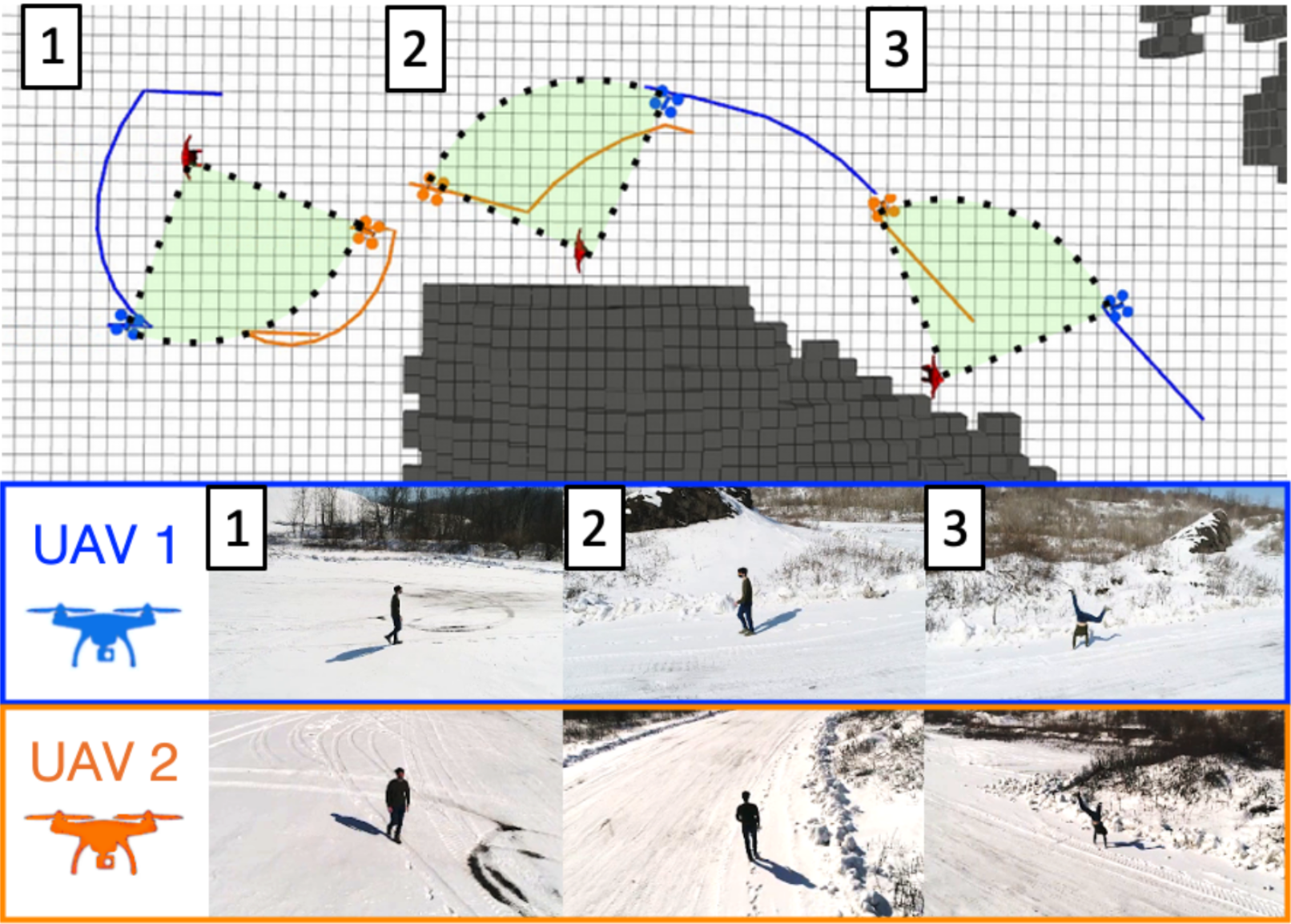
We provide studies evaluating system performance in simulation, and validate real-world performance using two drones while a target performs activities such as jogging and playing soccer.
Video
Additional Info
Citation
@inproceedings{ho2021_human3d,
author = {Ho, Cherie and Jong, Andrew and Freeman, Harry and Rao, Rohan and Bonatti, Rogerio and Scherer, Sebastian},
title = {3D Human Reconstruction in the Wild with Collaborative Aerial Cameras},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2021},
month = sep,
url = {https://arxiv.org/abs/2108.03936},
video = {https://youtu.be/jxt91vx0cns}
}
Please refer to our paper for details.
Contributors
- Cherie Ho <cherieh [at] cmu [dot] edu>
- Andrew Jong
- Harry Freeman
- Rohan Rao
- Rogerio Bonatti
- Prof. Sebastian Scherer <basti [at] cmu [dot] edu>


