Published:
by
Shichao Yang
Mapping and SLAM Datasets
Some mapping and SLAM related datasets from some of our previous publications.
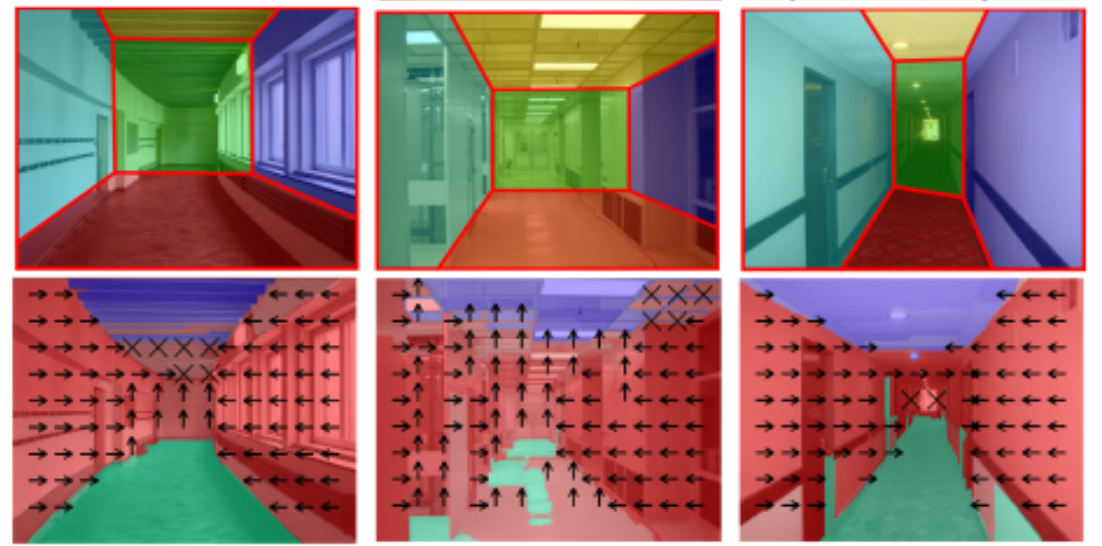
Real-time 3D Scene Layout from a Single Image Using Convolutional Neural Networks
Publications:
- Yang, S., Maturana, D. and Scherer, S., Real-time 3D Scene Layout from a Single Image Using Convolutional Neural Networks., International Conference on Robotics and automation (ICRA), 2016
Dataset: We assemble an image dataset (967 images) for corridor environments. All the images are annotated as ground or wall using polygons. More details and downloads could be found here.
CubeSLAM
Publications:
- Yang, S. and Scherer, S, CubeSLAM: Monocular 3D Object SLAM., IEEE Transactions on Robotics, 2019 PDF
Dataset: Code and dataset here.
Semantic 3D Mapping
Publications:
- Yang, S., Huang, Y., and Sebastion, S, Semantic 3D Occupancy Mapping through Efficient High Order CRFs, IROS 2017 PDF
Dataset: Code and dataset here.
Pop Up Slam
Publications:
- Pop-up SLAM: Semantic Monocular Plane SLAM for Low-texture Environments, IROS 2016, S. Yang, Y. Song, M. Kaess, S. Scherer PDF
- Real-time 3D Scene Layout from a Single Image Using Convolutional Neural Networks, ICRA 2016, S. Yang, D. Maturana, S. Scherer PDF
Dataset: Code and dataset here.
Contact
Shichao Yang {shichaoy@andrew.cmu.edu}


