TartanVO: A Generalizable Learning-based VO
Visual odometry remains a challenging problem in real-world applications. Geometric-based methods are not robust enough to many real-life factors, including illumination change, bad weather, dynamic objects, and aggressive motion. Learning-based methods do not generalize well and have only been trained and tested on the same dataset.
It is widely accepted that by leveraging a large amount of data, deep-neural-network-based methods can learn a better feature extractor than engineered ones, resulting in a more capable and robust model. But why haven’t we seen the deep learning models outperform geometry-based methods and work on all kind of datasets yet? We argue that there are two main reasons. First, the existing VO models are trained with insufficient diversity, which is critical for learning-based methods to be able to generalize. By diversity, we mean diversity both in the scenes and motion patterns. For example, a VO model trained only on outdoor scenes is unlikely to be able to generalize to an indoor environment. Similarly, a model trained with data collected by a camera fixed on a ground robot, with limited pitch and roll motion, will unlikely be applicable to drones. Second, most of the current learning-based VO models neglect some fundamental nature of the problem which is well formulated in geometry-based VO theories. From the theory of multi-view geometry, we know that recovering the camera pose from a sequence of monocular images has scale ambiguity. Besides, recovering the pose needs to take account of the camera intrinsic parameters. Without explicitly dealing with the scale problem and the camera intrinsics, a model learned from one dataset would likely fail in another dataset, no matter how good the feature extractor is.
To this end, we propose a learning-based method that can solve the above two problems and can generalize across datasets. Our contributions come in three folds.
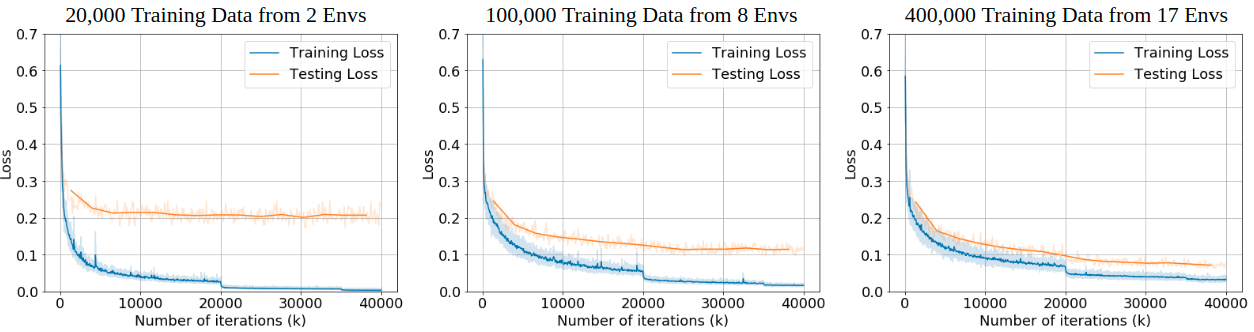
1). We demonstrate the crucial effects of data diversity on the generalization ability of a VO model by comparing performance on different quantities of training data.
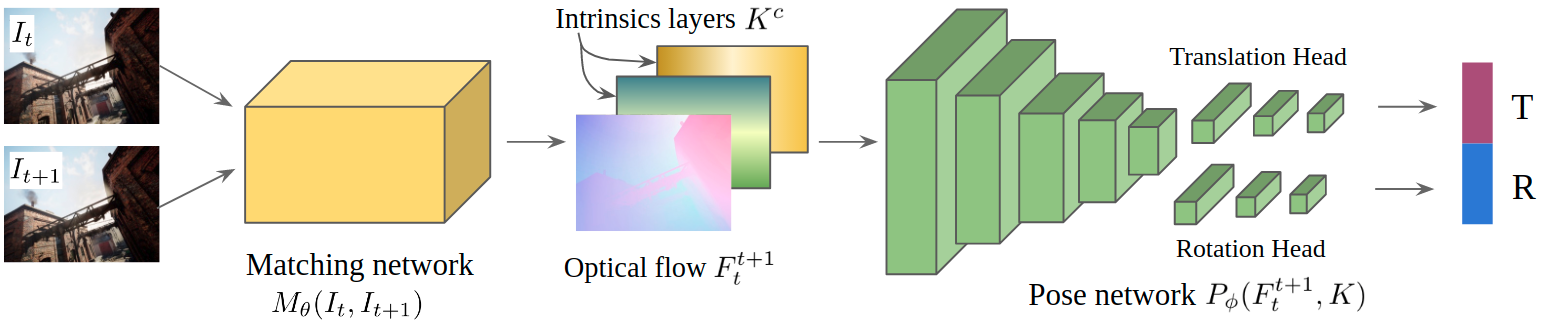
2). We design an up-to-scale loss function to deal with the scale ambiguity of monocular VO.
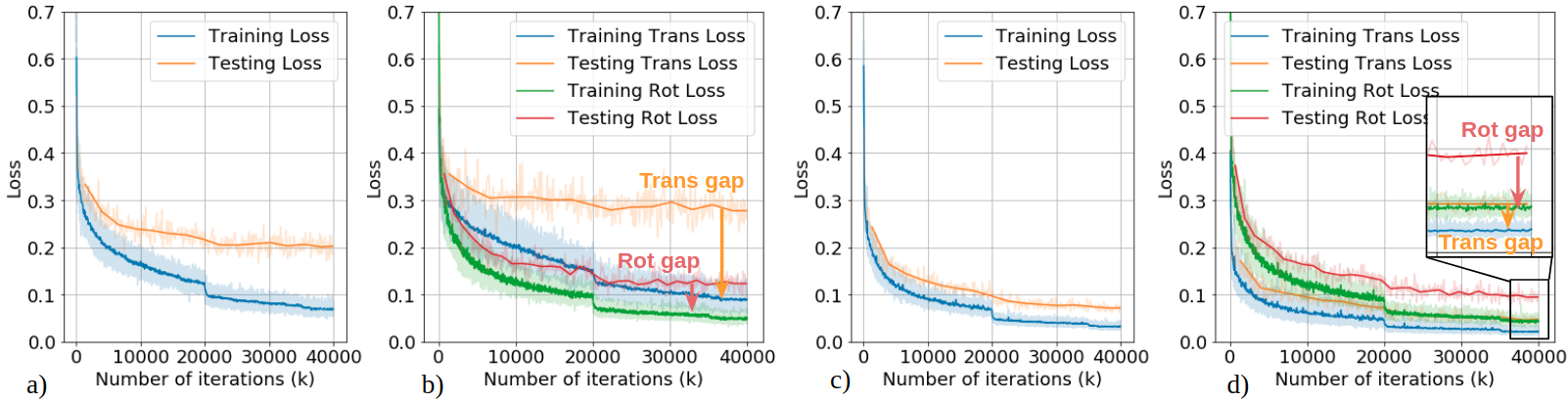
3). We create an intrinsics layer (IL) in our VO model enabling generalization across different cameras.
To our knowledge, our model is the first learning-based VO that has competitive performance in various real-world datasets without finetuning. Furthermore, compared to geometry-based methods, our model is significantly more robust in challenging scenes.
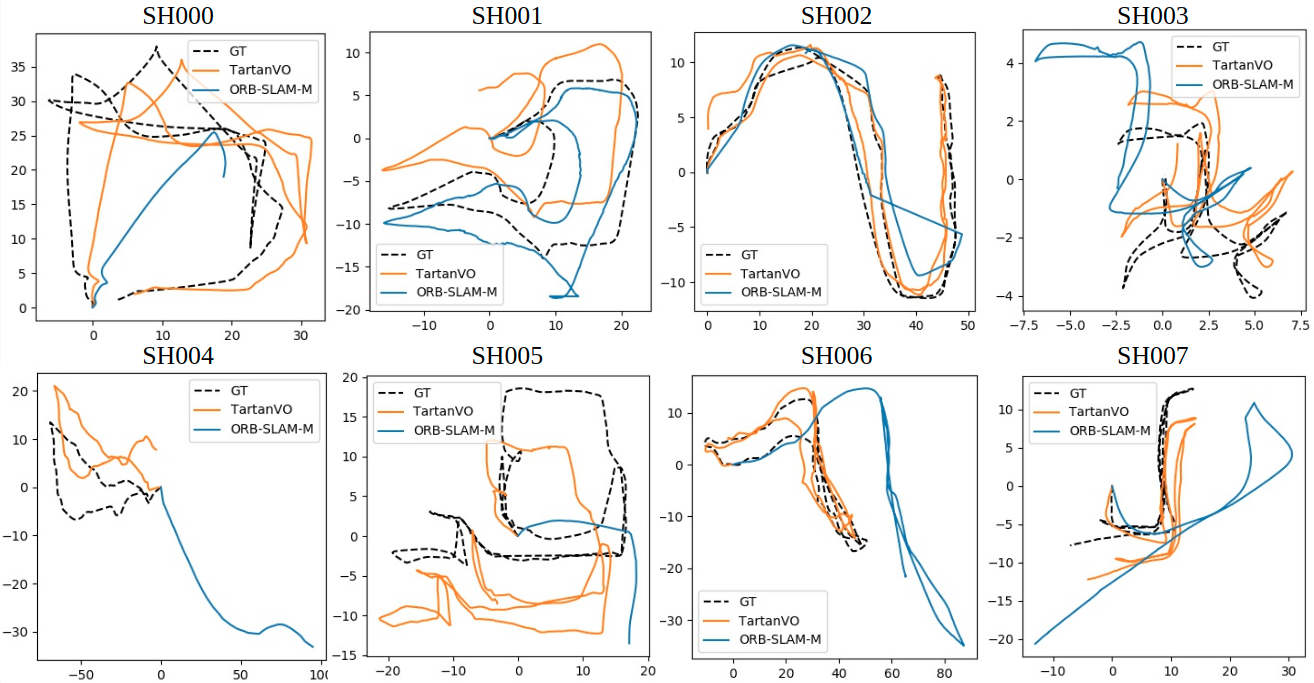
We tested the model on the challenging sequences of TartanAir dataset.
Our model can be applied to the EuRoC dataset without any finetuning.

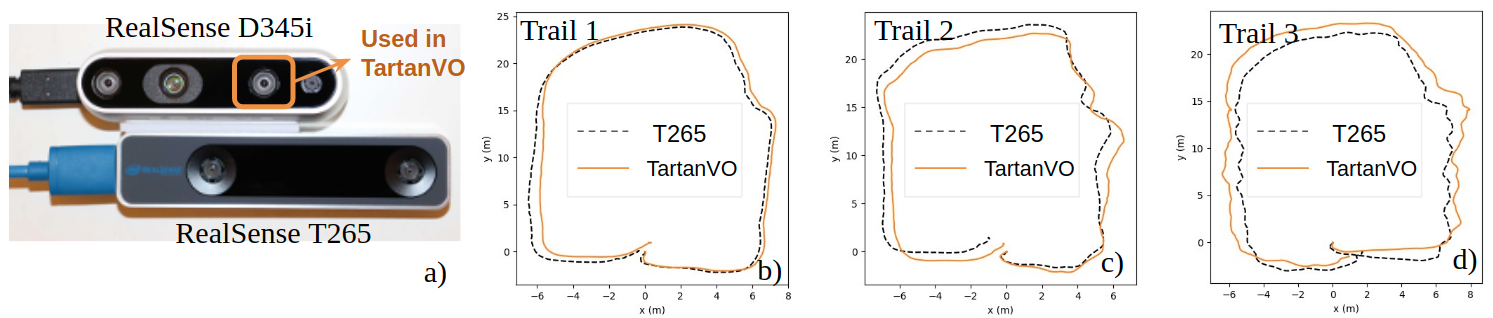
We also test the TartanVO using data collected by a customized senor setup.
Source Code and Dataset
We provide the TartanVO model and a ROS node implementation here. We are using the TartanAir dataset, which can be accessed from the AirLab dataset page.
Videos
Publication
This work has been accepted by the Conference on Robot Learning (CoRL) 2020. Please see the paper for more details.
@article{tartanvo2020corl,
title = {TartanVO: A Generalizable Learning-based VO},
author = {Wang, Wenshan and Hu, Yaoyu and Scherer, Sebastian},
booktitle = {Conference on Robot Learning (CoRL)},
year = {2020}
}
Contact
Wenshan Wang - (wenshanw [at] andrew [dot] cmu [dot] edu)
Yaoyu Hu - (yaoyuh [at] andrew [dot] cmu [dot] edu)
Sebastian Scherer - (basti [at] cmu [dot] edu)
Acknowledgments
This work was supported by ARL award #W911NF1820218. Special thanks to Yuheng Qiu and Huai Yu from Carnegie Mellon University for preparing simulation results and experimental setups.


