Design, Modeling and Control for a Tilt-rotor VTOL UAV in the Presence of Actuator Failure
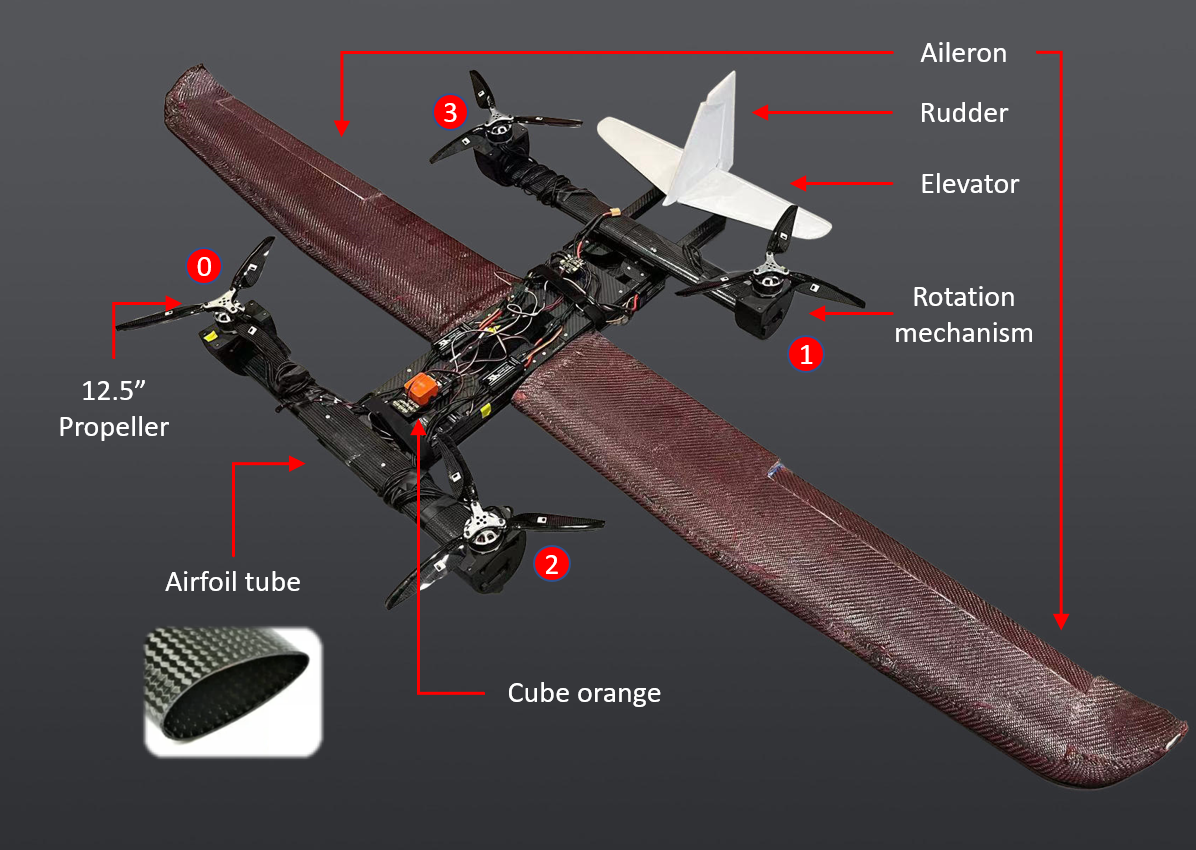
Enabling vertical take-off and landing while providing the ability to fly long ranges opens the door to a wide range of new real-world aircraft applications while improving many existing tasks. Tiltrotor vertical take-off and landing (VTOL) unmanned aerial vehicles (UAVs) are a better choice than fixed-wing and multirotor aircraft for such applications. Prior works on these aircraft have addressed the aerodynamic performance, design, modeling, and control. However, a less explored area is the study of their potential fault tolerance due to their inherent redundancy, which allows them to tolerate some degree of actuation failure. This work introduces tolerance to several types of actuator failures in a tiltrotor VTOL aircraft. We discuss the design and modeling of a custom tiltrotor VTOL UAV, which is a combination of a fixed-wing aircraft and a quadrotor with tilting rotors, where the four propellers can be rotated individually. Then, we analyze the feasible wrench space the vehicle can generate and design the dynamic control allocation so that the system can adapt to actuator failures, benefiting from the configuration redundancy. The proposed approach is lightweight and is implemented as an extension to an already-existing flight control stack. Extensive experiments validate that the system can maintain the controlled flight under different actuator failures. This work is the first study of the tiltrotor VTOL’s fault-tolerance that exploits the configuration redundancy to the best of our knowledge.
The following video is from the paper submitted to IROS 2022 (under review) that shows the general idea of the new controller design.
Main contributions of this work includes:
- Proposing a dynamic control allocation method that allows the system to adapt to actuator failures. The proposed approach is light-weight and can be quickly extended on an already-existing flight control stack;
- Designing and modeling a tiltrotor VTOL with the ability to rotate each individual propeller;
- Validating the system performance under the set of possible actuator failures in different flight phases;
- Providing the source code for the proposed strategies implemented on the PX4 flight controller firmware along with our simulation environment.
For more detailed information about this work, please refer to the publication
Publications
The general ideas on design and modeling of our custom tiltrotor VTOL and desing of the optimization based dynamic control allocation (so that the system can adapt to actuator failures) are described in the following publication (access on arXiv):
BibTeX:
@article{mousaei2022,
author={Mohammadreza Mousaei and Junyi Geng and Azarakhsh Keipour and Dongwei Bai and Sebastian Scherer},
booktitle={arXiv},
title={Design, Modeling and Control for a Tilt-rotor VTOL UAV in the Presence of Actuator Failure},
year={in press},
link={https://arxiv.org/abs/2205.05533},
}
IEEE Style:
M. Mousaei, J. Geng, A. Keipour, D. Bai, and S. Scherer, “Design, Modeling and Control for a Tilt-rotor VTOL UAV in the Presence of Actuator Failure,”, Under review.
Contact
Mohammadreza Mousaei (mmousaei [at] cs [dot] cmu [dot] edu)
Junyi Geng - (junyigen [at] andrew [dot] cmu [dot] edu)
Azarakhsh Keipour - (keipour [at] cmu [dot] edu)
Dongwei Bai - (saeedb [at] andrew [dot] cmu [dot] edu)
Sebastian Scherer - (basti [at] cmu [dot] edu)


