Wire detection dataset
This dataset is part of the work done for the paper “Wire Detection using Synthetic Data and Dilated Convolutional Networks for Unmanned Aerial Vehicles” puslished at IROS 2017. The authors of the paper are Ratnesh Madaan, Daniel Maturana, and Sebastian Scherer.
Dataset
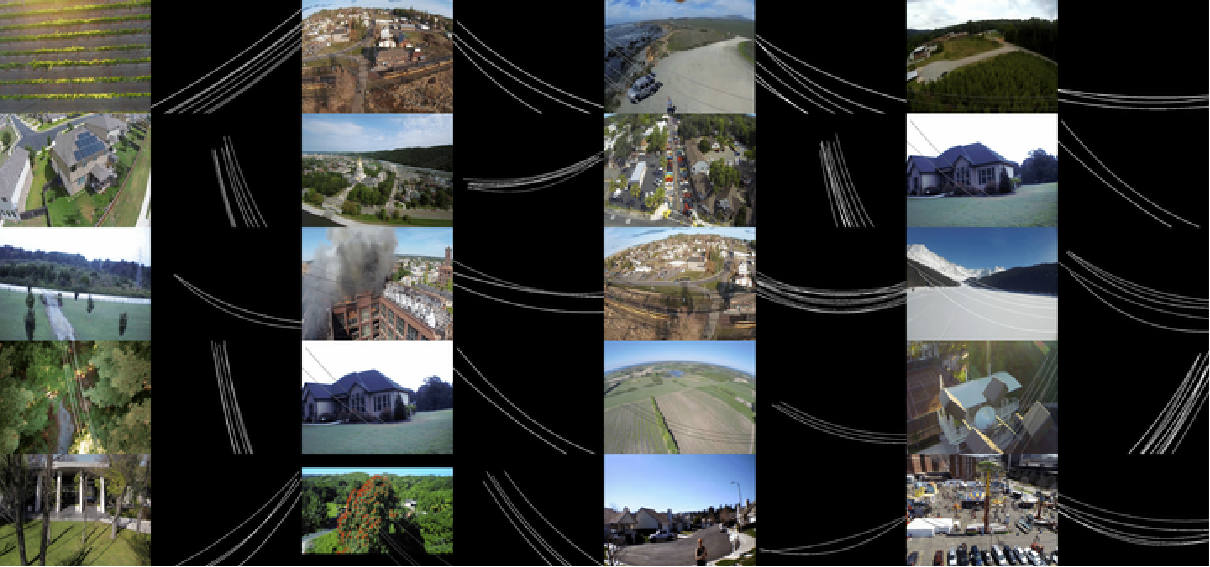
The dataset provides pixel labels for wires such as power lines.
Data Structure
The data samples are saved in individual folders. In each folder, we have the follwing files.
0380/
├── ground_truth_viz.png
├── labeled_ground_truth.png
├── labels.ground
└── original_image.png
The pixel values saved in labeled_ground_truth.png are defined as
- 1: non-wire pixel.
- 2: wire pixel.
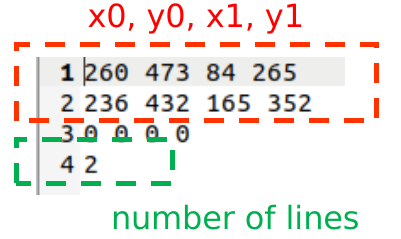
The labels are visualized in ground_truth_viz.png as a black-and-white image. The labels.ground file is a text file showing the pixel coordinates of the end points of the individual lines.
Download
The data can be downloaded directly from here.
Citation
@inproceedings{madaan2017wire,
title={Wire detection using synthetic data and dilated convolutional networks for unmanned aerial vehicles},
author={Madaan, Ratnesh and Maturana, Daniel and Scherer, Sebastian},
booktitle={2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={3487--3494},
year={2017},
organization={IEEE}
}
Related work also from the AirLab
@inproceedings{Madaan:2019kb,
author = {Madaan, Ratnesh and Kaess, Michael and Scherer, Sebastian},
booktitle = {Proceedings - IEEE International Conference on Robotics and Automation},
doi = {10.1109/ICRA.2019.8793852},
isbn = {9781538660263},
issn = {10504729},
month = may,
pages = {5657--5664},
title = {Multi-view reconstruction of wires using a catenary model},
year = {2019}
}
@inproceedings{Dubey-2018-107515,
author = {Dubey, Geetesh and Madaan, Ratnesh and Scherer, Sebastian},
booktitle = {IEEE International Conference on Intelligent Robots and Systems},
doi = {10.1109/IROS.2018.8593499},
isbn = {9781538680940},
issn = {21530866},
month = oct,
pages = {6311--6318},
title = {DROAN - Disparity-Space Representation for Obstacle Avoidance: Enabling Wire Mapping Avoidance},
year = {2018}
}
Contact
Yaoyu Hu (editor) - yaoyuh@andrew.cmu.edu
Sebastian Scherer - basti@andrew.cmu.edu
Related links
Term of use

This work is licensed under a Creative Commons Attribution 4.0 International License.