Latest News
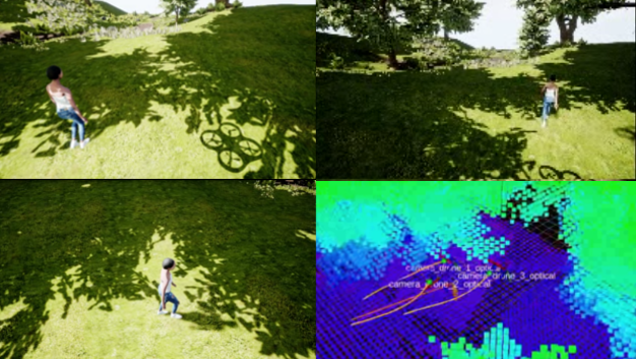
We need more pilots. AI can help! Advanced Aerial Mobility (AAM) is an inclusive term that covers...
The AirLab had six papers accepted to the 2022 International Conference on Robotics and Automatio...
The AirLab had five papers accepted into this year’s IEEE International Conference on Robotics an...
This summer we had a team of amazing interns in the AirLab. We spent a special and memorable peri...
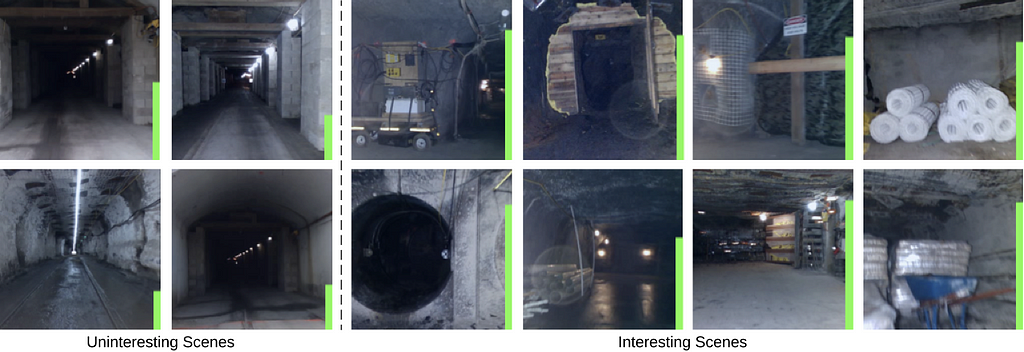
Infrastructure inspection is one of the rich research topics conducted here in the AirLab. We aim...
Three Air Lab members did internships at Facebook this summer. Welcome back! Here are the summari...
The AirLab has one oral paper accepted by ECCV 2020 which will be held on 23–28 August this year....
The AirLab had eight papers accepted to the International Conference on Intelligent Robots and Sy...
AMiner recognized Sebastian Scherer as an AI 2000 Most Influential Scholar Nominee in Robotics, b...
Our journal paper, “High performance and safe flight of full‐scale helicopters from takeoff to la...