Multi-Robot Multi-Room Exploration with Geometric Cue Extraction and Circular Decomposition
This work proposes an autonomous multi-robot exploration pipeline that coordinates the behaviors ...
Research
We advance state-of-the-art autonomous systems.
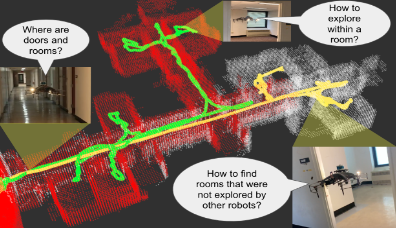
This work proposes an autonomous multi-robot exploration pipeline that coordinates the behaviors ...
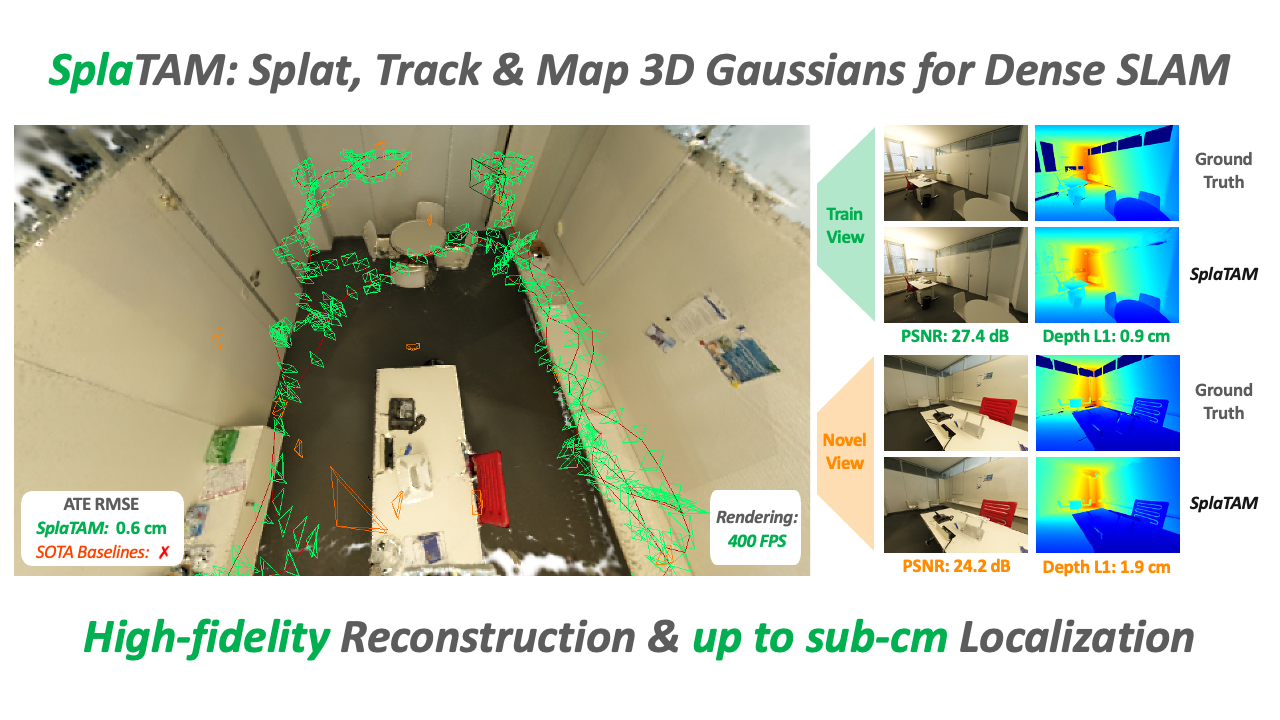
Precise camera tracking & high-fidelity reconstruction of challenging real-world scenarios.
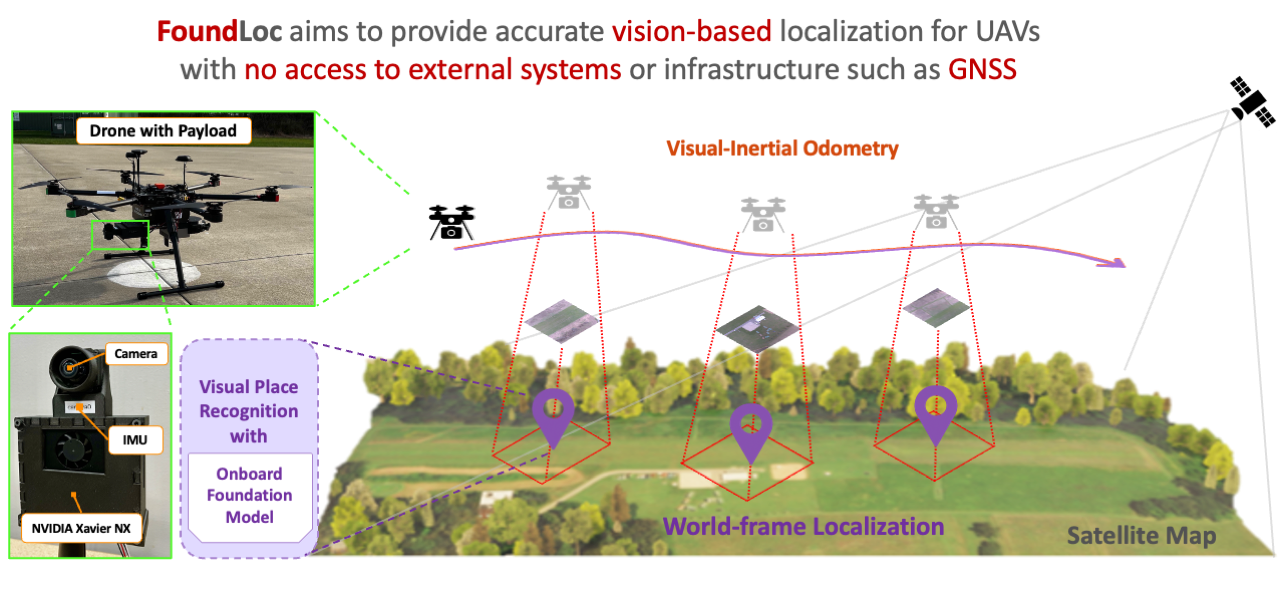
GPS-denied localization with no initial assumption of position (kidnapped robot problem).
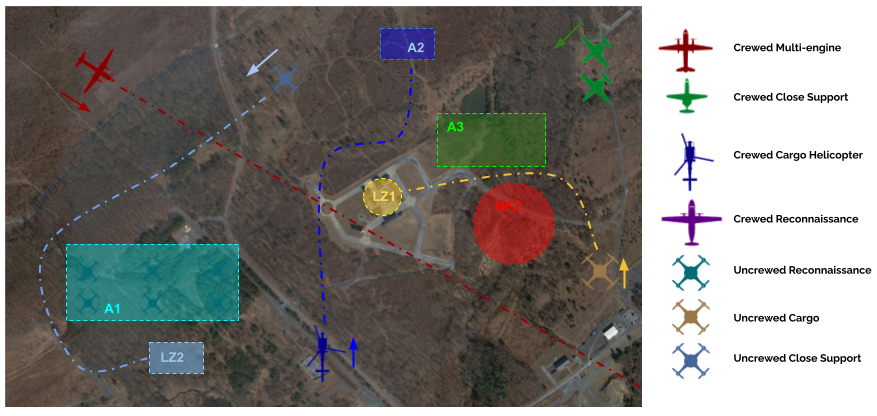
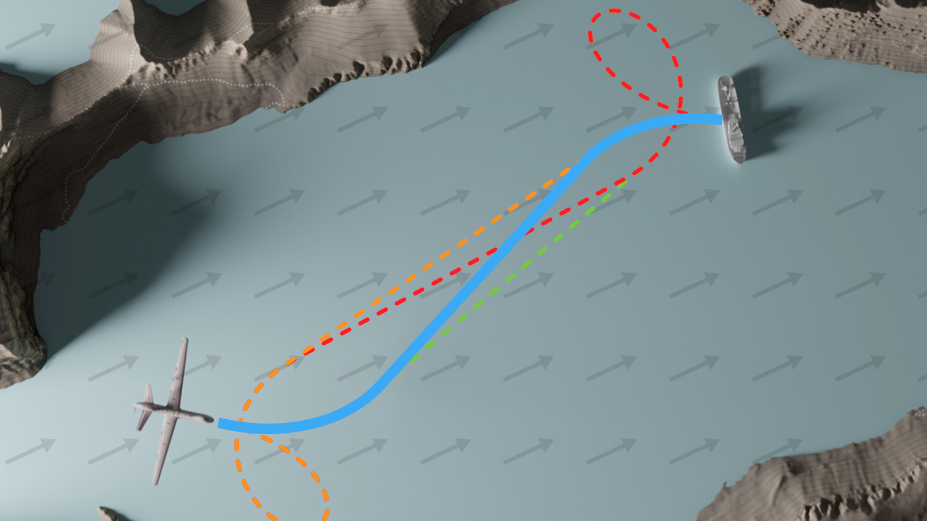
An autonomy system that keeps UAVs and manned traffic safely separated and behave as expected in ...
What is the DARPA Triage Challenge?As stated on the DARPA Triage page: The DARPA Triage Challeng...
We present a method to quickly find the time-optimal, curvature-constrained path between two stat...
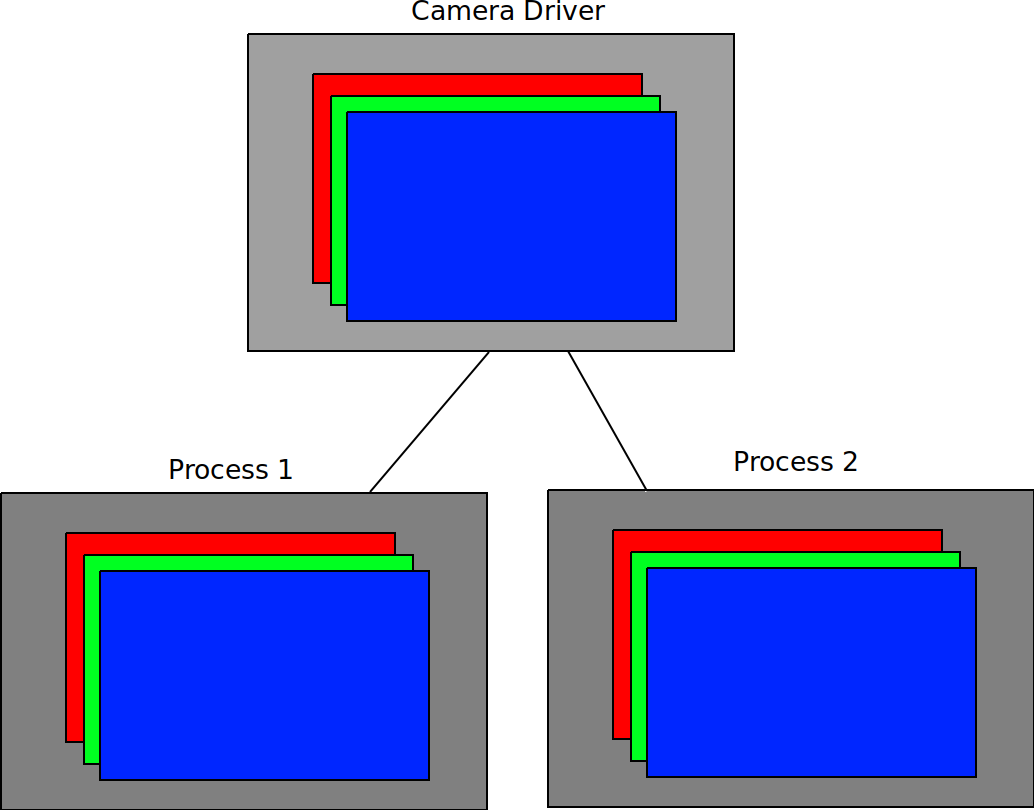
The image sharing library allows a user to transfer images between processes on an Nvidia Jetson ...
This is the project page of the ICRA submission, “Geometry-Informed Distance Candidate Se...
Off-road driving is an important robotics task with applications in agriculture, mining, explorat...

Retrieving the location of an image taken anywhere, anytime and under anyview.
During a 4-year research collaboration with an international corporation in civil engineering (Sh...
The dangers of wildfire continues to grow due to climate change. Mere minutes can turn a previous...

We need more pilots. AI can help! Advanced Aerial Mobility (AAM) is an inclusive term that covers...
Enabling vertical take-off and landing while providing the ability to fly long ranges opens the d...
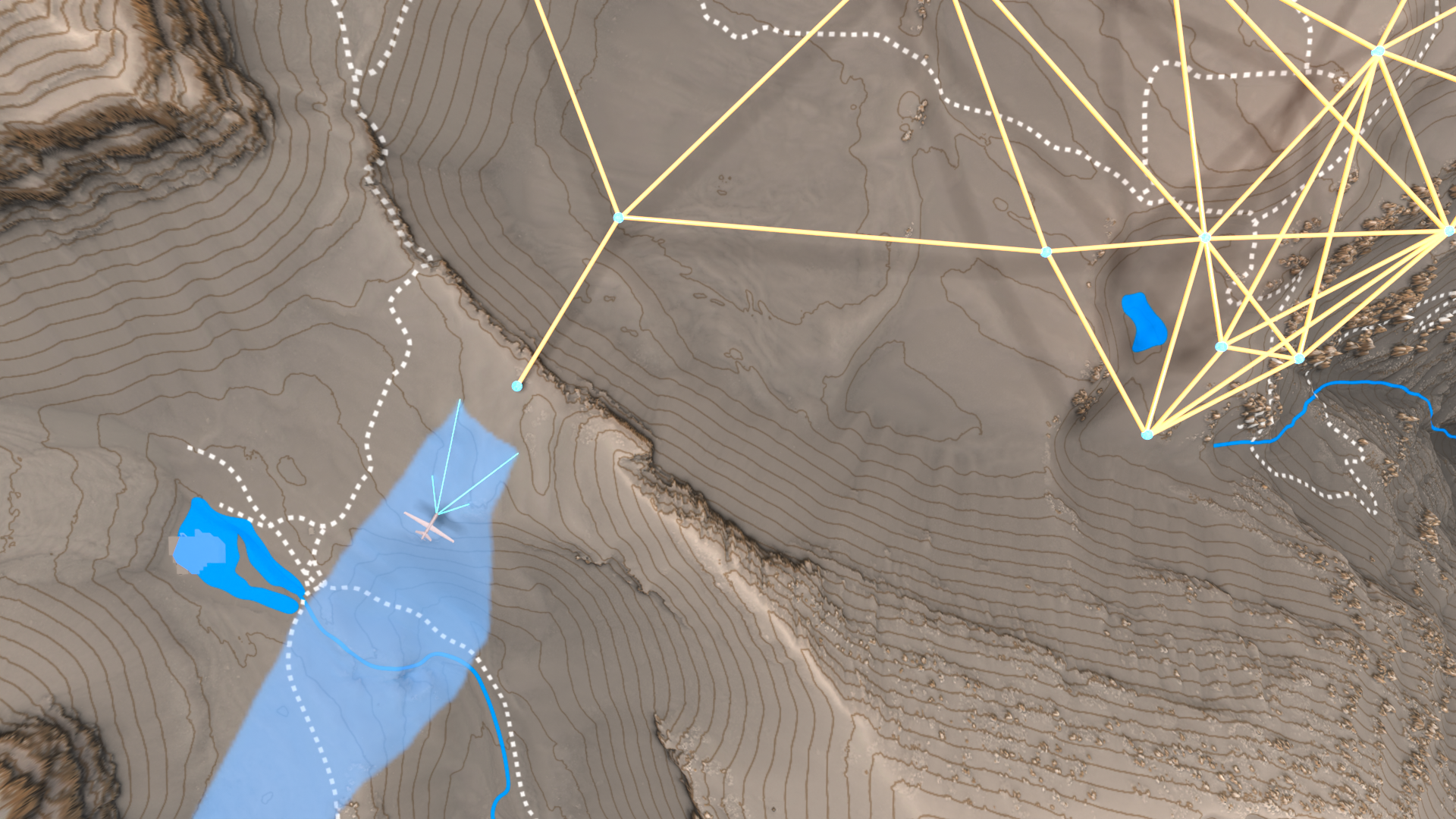
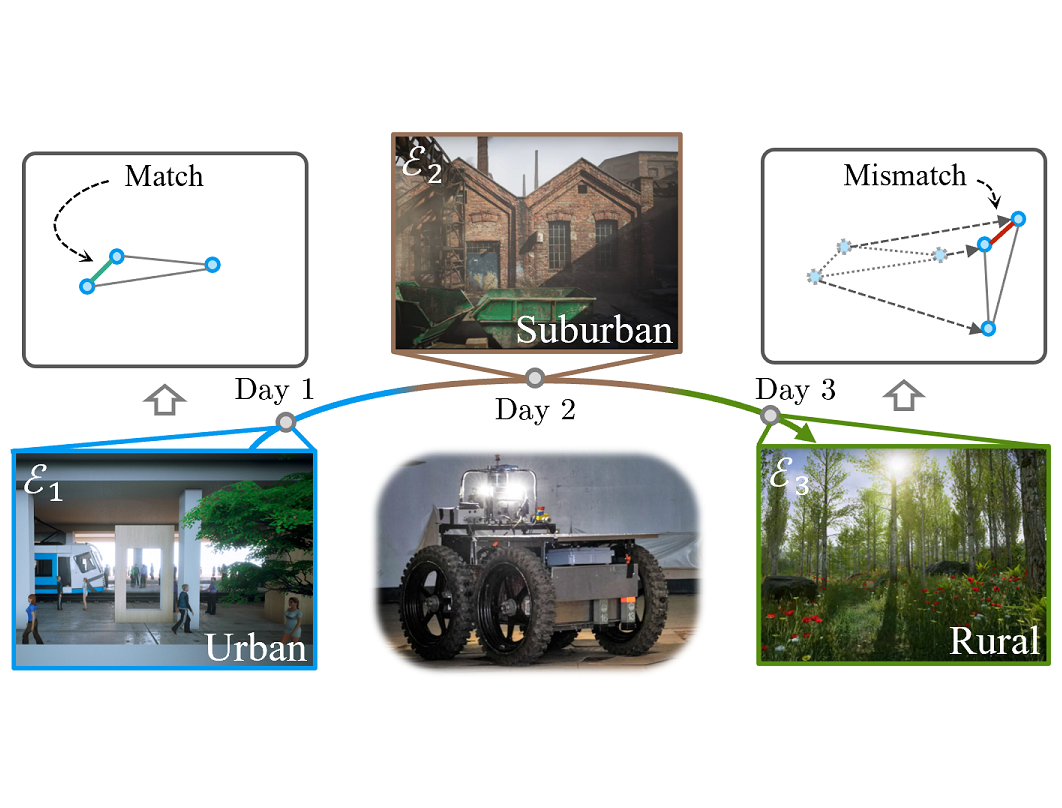
This is the code accompanying the paper Resilient Multi-Sensor Exploration of Multifarious Enviro...
Informative path planning is an important and challenging problem in robotics that remains to be ...
Video Object Identification
Air Series is a collection of articles mentored by Chen Wang.
Aerial vehicles are revolutionizing applications that require capturing the 3D structure of dynam...

Graph neural networks (GNNs) are powerful models for many graph-structured tasks. Existing models...
Dynamic Object-aware SLAM (DOS) exploitsobject-level information to enable robust motion estimati...
Object encoding and identification is crucial for many robotic tasks such as autonomous explorati...
After deployment to the wild, the robot may benefit if it can incrementally learn from the workin...

Today, manned and unmanned vehicles are separated, limiting the utility and flexibility ofoperati...
We present a method for localizing a single camera with respect to a point cloud map in indoor an...
The 2D to 3D registration problem is to match a query image with a 3D model to establish the geom...
The objective of this Department of Energy funded project is to use empirical testing, life cycle...
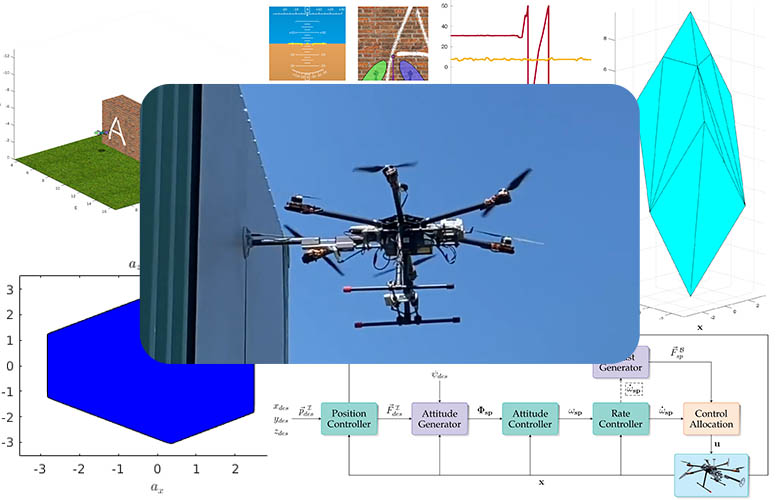
The introduction of fully-actuated multirotors has opened the door to new possibilities and more ...
This is the project page of the IROS submission “ORStereo: Occlusion-Aware Recurrent Stereo Match...
Visual odometry remains a challenging problem in real-world applications. Geometric-based methods...

The autonomous landing of an Unmanned Aerial Vehicle (UAV) on moving platforms has been an active...

The detect-and-avoid problem is the “holy grail” for small aircrafts and drones that need to fly ...
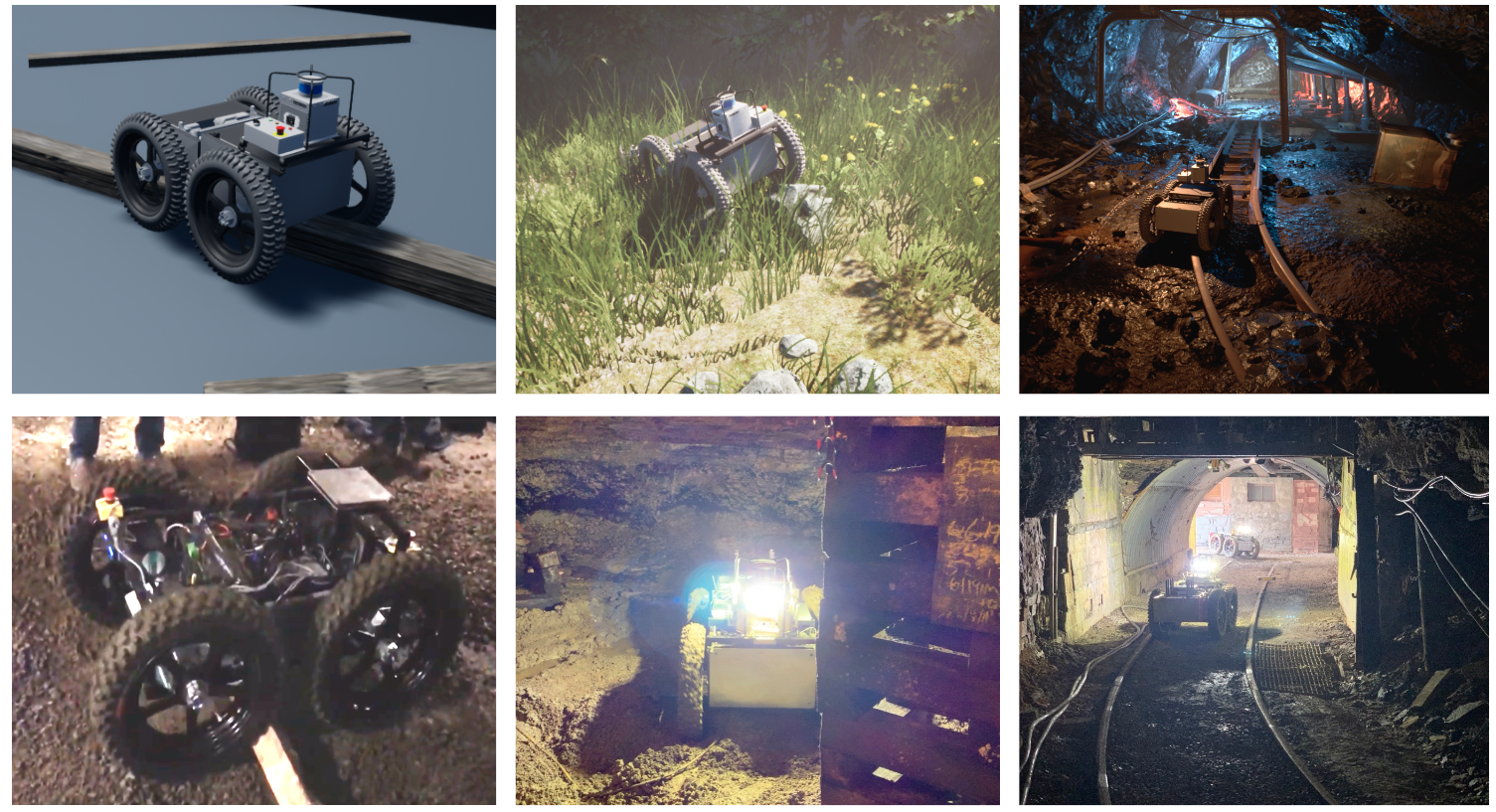
The mobility of autonomous robots is still limited especially in real-world offroad terrain (as s...
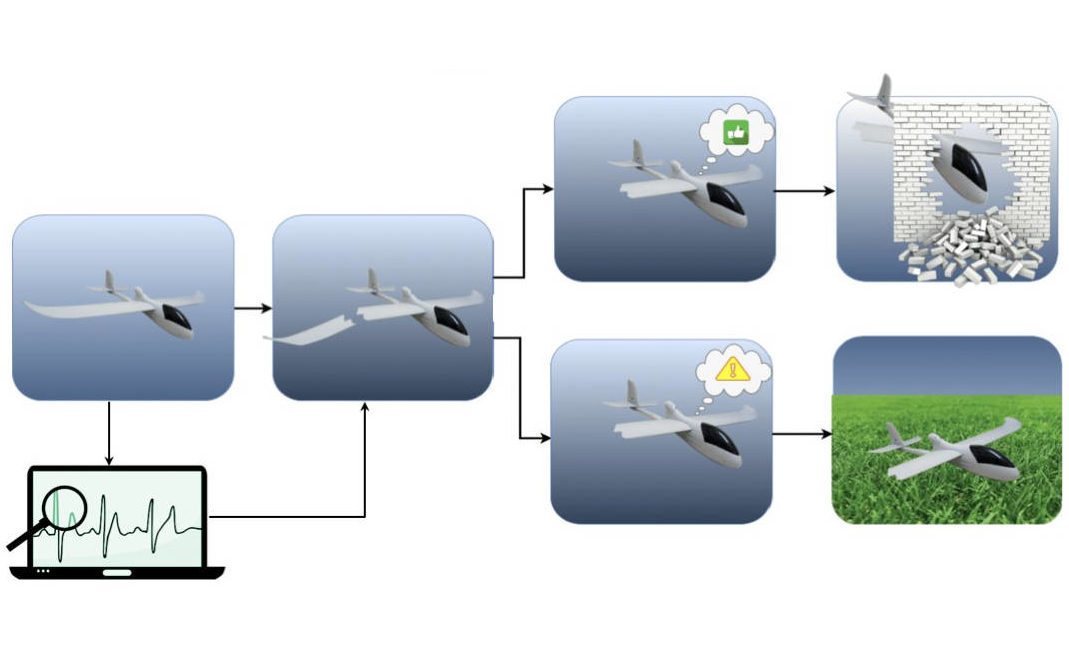
The recent increase in the use of aerial vehicles raises concerns about the safety and reliabilit...

The problem of visual interestingness detection, which is crucial for many practical applications...

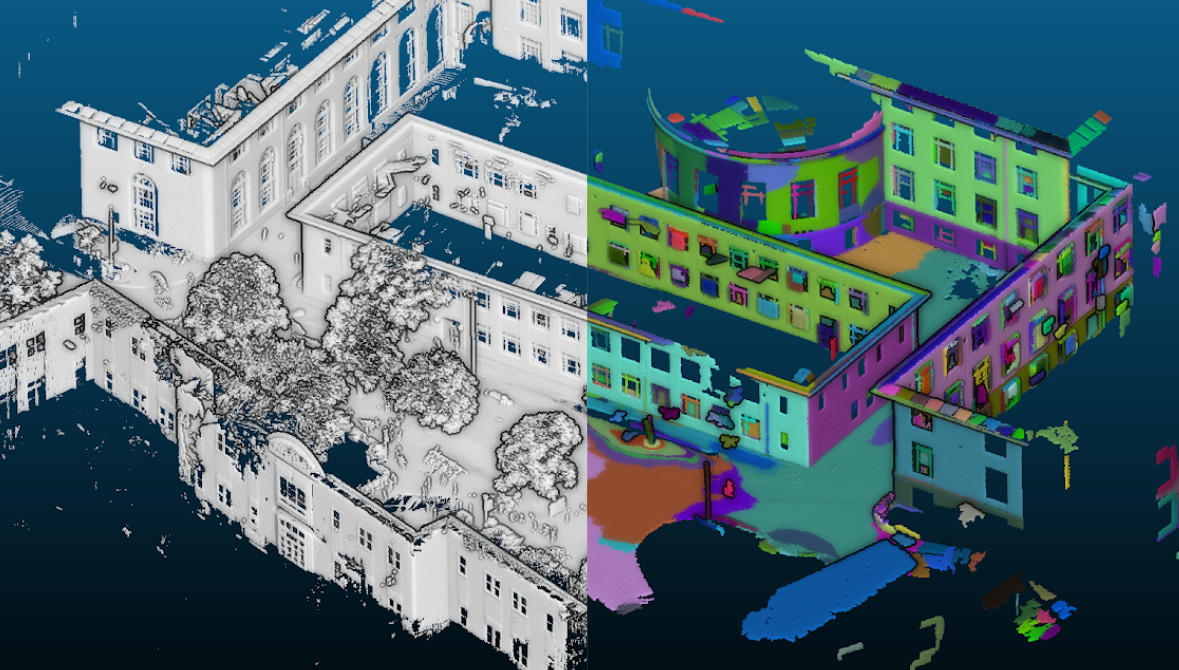
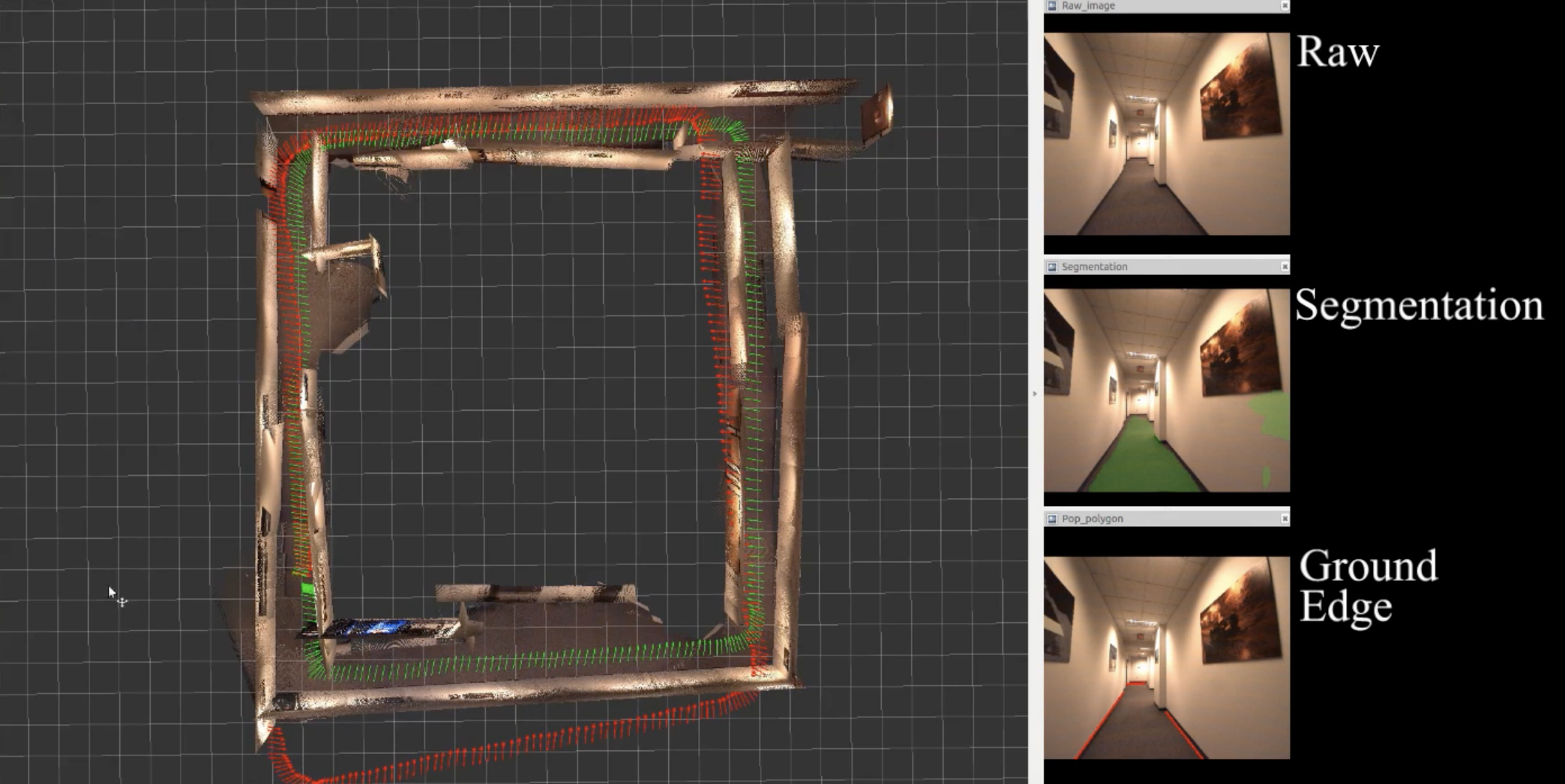
We developed a method for real-time semantic understanding and 3D mapping in both static and dyna...

The Mohamed Bin Zayed International Robotics Competition seeks to exhibit the current state-of-th...
Aerial cinematography is revolutionizing industries that require live and dynamic camera viewpoin...

The conventional way of aging infrastructure (e.g. bridges and tunnels) inspection can be time-co...

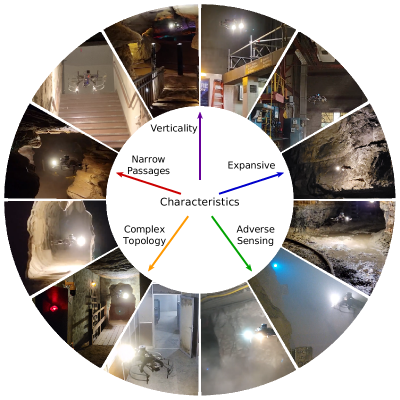
What is the Subterranean (SubT) Challenge?As stated on the DARPA SubT page: The DARPA Subterrane...
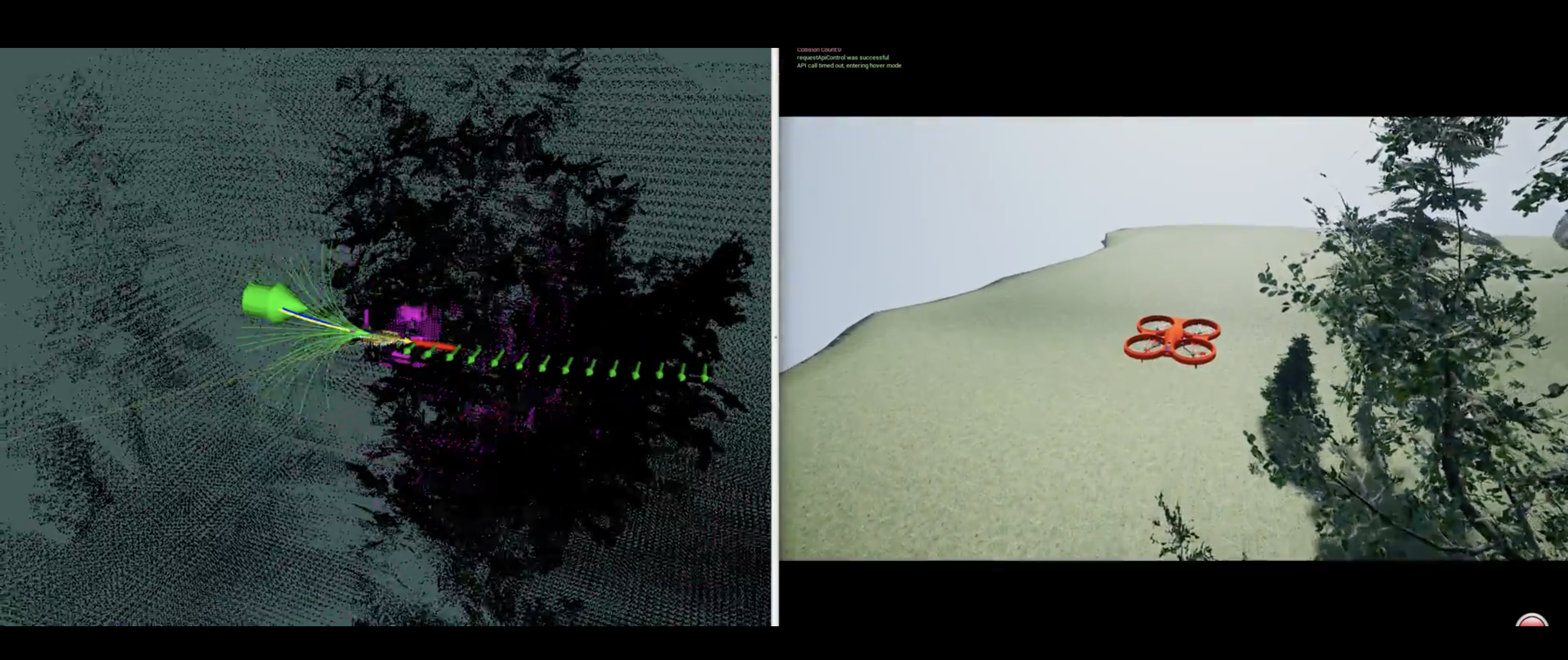
Below are various projects that allow a drone to fly and land safely in challenging environments.
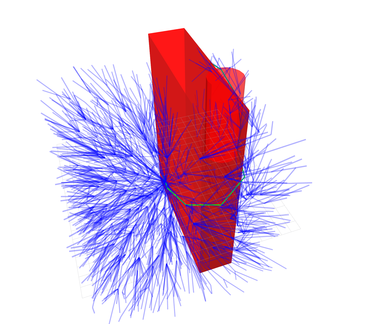
Over the years our lab our lab has created various open-source planning packages. This list is by...
In this project, we study the problem of understanding the 3D scene layout from images and combin...