Wildland Fire Safety Monitoring
The dangers of wildfire continues to grow due to climate change. Mere minutes can turn a previously safe situation into a near-death scenario, as shown in the video below. Firefighters need more detailed and timely situational awareness to operate safely in these chaotic environments.
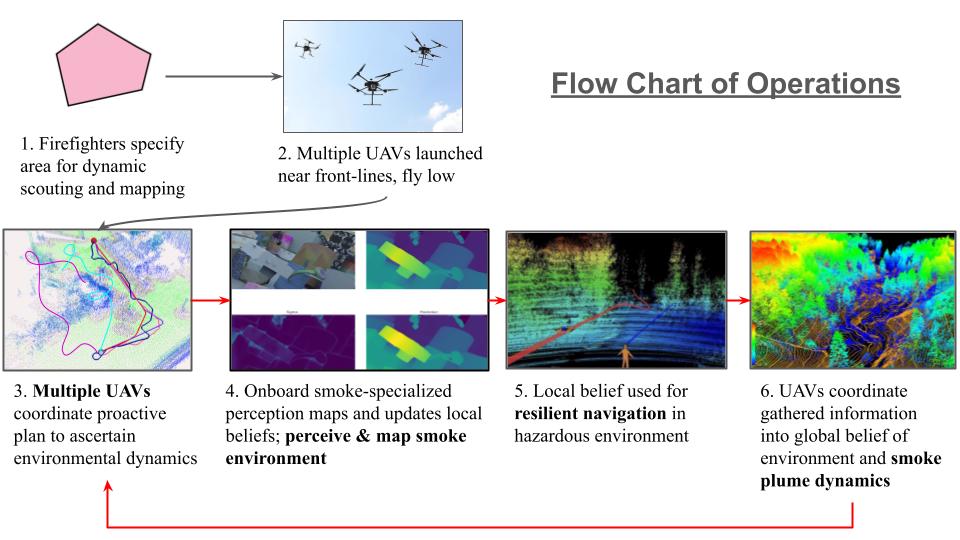
We are conducting research to develop Unmanned Aerial Systems to aid in wildfire monitoring. The hazardous, dynamic, and visually degraded environment of wildfire gives rise to many unsolved fundamental research challenges.
- Planning: how should the system decide when and where to observe in a constantly evolving and uncertain environment?
- Perception: how do we overcome severe visual degradation to detect crew members and obstacles?
- Forecasting: how can we use our observations to predict how the environment will evolve in the short and long term?
- Integration: how do we incorporate all these challenges into a cohesive closed-loop system?
We aim to conduct integrative research that enables autonomous systems to operate robustly under high uncertainty and risk.
Systems: Drone Platform

We built an aerial robotics platform for wildland fire monitoring. Powered by a compact yet powerful NVIDIA Jetson onboard computer, our UAS processes and plans on high density information in real time. Its RGB, thermal, and lidar sensors give the drone multiple sources of information to work with, letting it to perceive, map, and communicate fire-position up to a 1-km distance.

Our UAS is also intelligent. It autonomously forms and executes a plan from human-in-the-loop input. The UAS continues to plan autonomously in real time based on its new observations about the world. Throughout, the drone streams back real-time HD video to the ground station. See the Field Tests section below for video demonstration.
Detailed documentation about the system may be found on the Fireflies system website, developed in collaboration with CMU’s MRSD program.
Planning
Informative path planning is an important research topic in robotics with several applications in the spatiotemporal monitoring domain. Most works only consider planning on static information maps or short-horizon planning, whereas many real world scenarios call for planning on the dynamics of an environment with evolving information. Planning with growing and dynamic uncertainty presents a unique challenge requiring long-term horizon planning for globally optimal trajectories. In this work we describe dynamic information maps and develop approaches based on Monte Carlo Tree Search (MCTS) for long-horizon planning. We first develop an MCTS that uses informed time-aware actions to plan an optimal trajectory in the dynamic map. We further build upon this method with a learned approach that directly predicts the future value of a state instead of requiring a computationally intensive rollout. We demonstrate that both these methods outperform a primitive action MCTS baseline on a multitude of randomly generated experiments.
This work is submitted and under review for ICRA 2023. Paper may be found here.
Simulator: Wildfire AirSim
Wildfires are obviously dangerous environments to fly in. Therefore it’s of utmost importance to validate as much as possible about any planning algorithms before deploying them in the field.
We develop an open-source robotics simulator for autonomous aerial monitoring of wildland fires. We implement the simulator with AirSim, Unreal Engine, and GridFire. AirSim permits flexible API control through ROS. Unreal Engine provides high quality graphics, visualization, and powerful environment editing. GridFire is an open source scientific wildfire model, allowing one to import real-world landsat data of any location on earth, to simulate realistic growth of fires. We combine the advantages of all these sources into one cohesive simulator: Wildfire AirSim.
The alpha release of our open source simulator may be found on our GitHub. We will continue development over the next few years to close the sim-to-real gap.
Field Tests
In the wild: prescribed fires
Over the past two years, we’ve had the opportunity to collect data and test autonomy over prescribed fires. Thusfar, our team has flown over four prescribed burns in western Pennsylvania.
Controlled sites: Gascola
Since prescribed fire season only occurs twice per year in spring and fall, we instead test frequently at our own field testing site. Below shows our latest test conducted at CMU’s Gascola test site for field robotics, featuring planning and streaming back of information in real time.
Further photos in our Google Photos album.
Future Plans
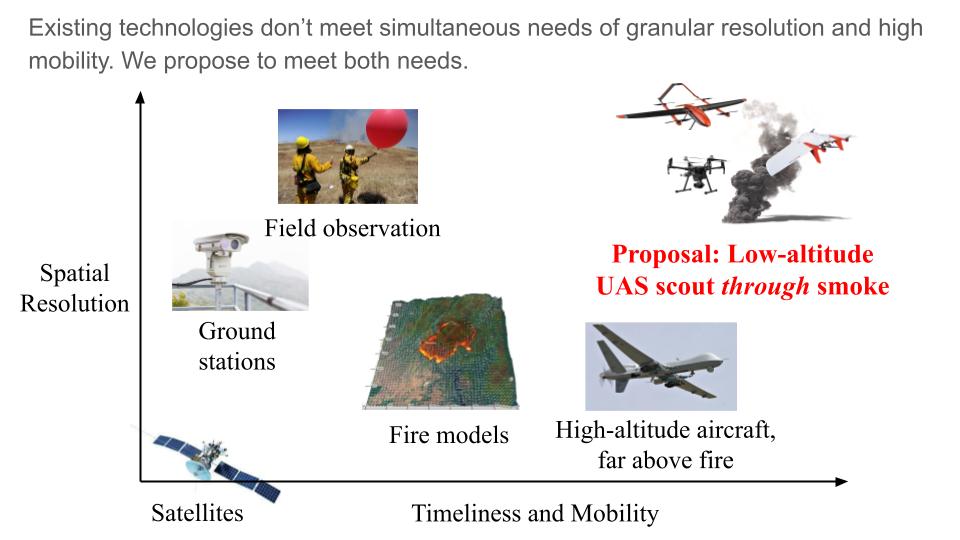
We’re fortunate and thankful to have been awarded a three-year grant from the National Science Foundation’s National Robotics Initiative. The funding is scheduled for 2023-2026. In essence, we observe that existing technology gives information on the scale of kilometers and hours, but crew on the frontlines need situational awareness at their scale, i.e. meters and minutes. Our proposed solution is to fly much closer to the ground to provide this needed micro-scale monitoring. We aim to pursue the following research initiatives:
Contributors
-
Andrew Jong (Lead - Planning, Perception, Systems, Simulation)
-
Brady Moon (Planning)
-
Arjun Chauhan (Systems)
-
Kevin Gmelin (Systems)
-
Sabrina Shen (Systems)
-
Manuj Trehan (Systems)
-
Akshay Venkatesh (Systems)
-
Siva Kailas (Perception, Planning)
-
Junbin Yuan (Perception, Planning)
-
Calvin Nguyen (Simulation)
-
Jacky He (Simulation)
-
Dr. Katia Sycara (Co-PI)